智能驾驶仿真模拟器被广泛应用于如训练、汽车开发、科学研究等在内的许多领域。设计用途不同,不同功能的驾驶仿真模拟器在设计上也各有不同。八自由度驾驶仿真模拟器主要用于主动安全研究,具有高度物理以及交通环境拟真度。设计型驾驶仿真模拟器主要用于验证汽车的设计思想,或测试车辆的性能和功能。教育培训驾驶仿真模拟器为驾驶培训,交通安全教育等领域提供一种经济,安全的培训和教育工具。
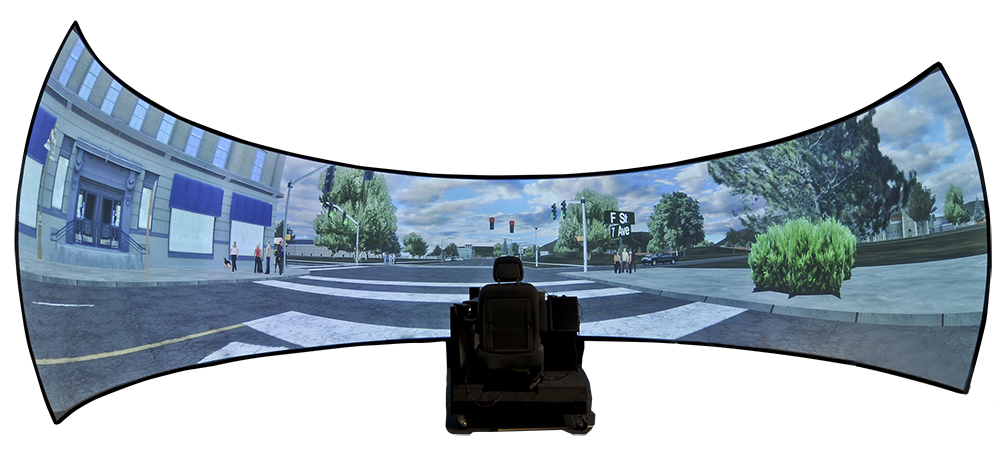
智能驾驶仿真模拟器系统硬件主要由汽车驾驶操纵设备、数据I/O模块、计算机/工作站、音响设备、运动平台、环幕系统等组成。
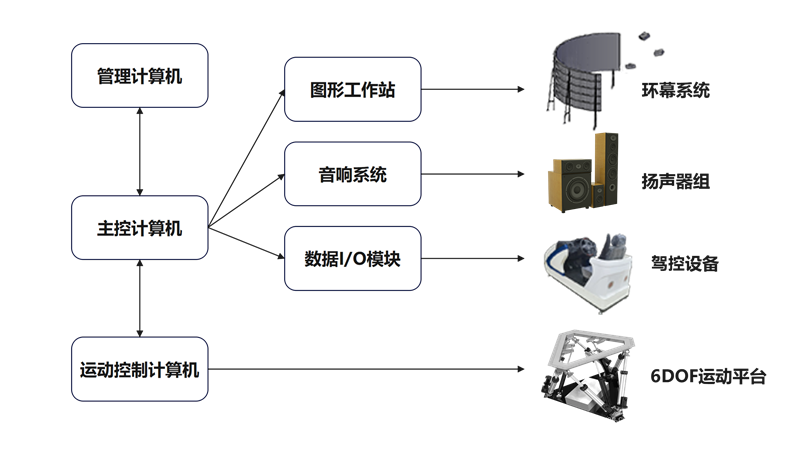
主控计算机主要负责运行驾驶仿真模拟器的各个模块。图形工作站主要根据主控计算机发来的参数对虚拟道路环境的三维模型进行实时渲染,并实现环幕视景仿真。数据I/O模块完成对使用人员操纵汽车操控设备的动作进行采样,并根据仿真结果数据驱动仪表台或其他硬件设备。系统中配备了由实时运动控制计算机控制的六自由度电动运动平台,能够提供三个自由度平动、三个自由度转动的体感仿真功能。在模拟舱体内安装有5.1环绕立体声扬声器组,用于构建驾驶仿真时的虚拟声学环境。运行在管理计算机上的管理软件负责对整个仿真实验过程进行准备、管理、调度、记录及分析。

软件系统主要包含:数据采集、车辆仿真主控、车辆动力学仿真、虚拟交通环境仿真、微观交通仿真、车路协同仿真、CGI(Computer Generate Image,CGI)视景仿真、场景3D模型及路网数据、声音仿真、体感仿真与运动控制、仿真实验设计与管理、仿真记录与分析、仿真实验回放、底层通信等子系统或模块。

车辆仿真主控模块会根据数据采集模块获得的使用者实时输入,计算出车辆的工况,调用车辆动力学仿真模块计算出车辆的速度、位置、姿态等状态参数。这些仿真计算结果被用于驱动CGI视景仿真程序、声音仿真程序及体感仿真及运动控制程序,完成场景画面的渲染、数字音频的合成、对六自由度运动平台的控制。还有部分数据用于驱动指示灯、车载仪表等。其中CGI视景仿真程序支持环幕系统、CAVE等输出模式,满足不同仿真实验的需求。

虚拟交通环境仿真程序用于生成汽车仿真运行的虚拟交通环境,实现了对该环境中动、静态要素的仿真,包括:交通设施、交通信号设备、路侧设施、车流、非机动车流、行人群等。

仿真实验管理软件用于在给定的虚拟交通环境中设计仿真实验、监控仿真实验的运行过程、对仿真实验数据进行记录与输出、实现仿真实验的同步回放等功能。

远景伟视公司与汽车产业链上下游企业及科研机构开展深度合作,共同研发新一代智能驾驶模拟平台,推动车路协同技术与自动驾驶测试标准的革新。随着虚拟现实、人工智能技术的持续发展,未来驾驶模拟器不仅在仿真精度与交互体验上实现突破,更将在智慧交通、车路协同和自动驾驶测试等领域拓展出更广阔的应用前景。